December 2008

Bill Stone Tracking his ENDURANCE Robot under the ice at Bonney Lake Antarctica
All pictures are from Vickie Siegel's Blog
Radiolocation
techniques are being used to track the ENDURANCE robot during its
missions under the ice of Lake Bonney in the Dry Valleys region near
McMurdo Station, Antarctica. The goal is to collect data from top
to bottom of the water column in a grid pattern over the entire lake,
and also to obtain a 3-D sonar image of the underwater portion of
Taylor Glacier at the head of the lake (picture below). For
details of ENDURANCE, the people, and the mission, visit http://www.evl.uic.edu/endurance/bonney08.html.
Also read Vickie Siegel's Blog on this site. For Shilpa Gulati's
Blog, visit http://sgulati.wordpress.com.

Taylor Glacier, Bonney Lake, Antarctica
Taylor Glacier, Bonney Lake, Antarctica
My job was to design
and build a 3496 Hz beacon to be carried by ENDURANCE during each
mission. Initially, it was intended to be an emergency recovery
beacon, designed to activate after a period of time in case the robot
ran out of power or lost it's way. Later, the decision was made
to operate the beacon continuously with a long duration to allow real
time tracking and allow plenty of time for recovery in the event it
became lost. I designed a low power Class-E beacon (40Ma x
12V=0.48 Watts). I used a 4.6 AH lead-acid battery to obtain
>100 hours run time. I included a tilt-switch to allow the
beacon to be shut off between missions without an external switch or
opening it up. In this way it could be used for several missions
before recharging.
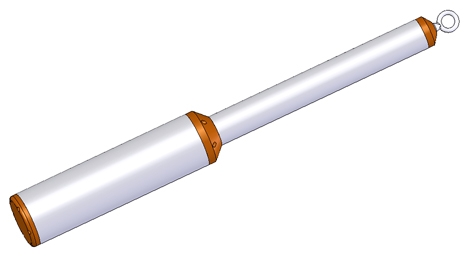
Plastic underwater beacon housing (Bill Stone drawing)
The ferrite rod antenna is located in the small upper portion of the housing, with the battery and electronics in the larger lower portion. In use, the beacon is simply turned upright to turn it on, then hung on Endurance by its eye bolt. Since it must be self-leveling, it is free to swing over a limited range. Tests were conducted to make sure that "ground zero" really was directly over ENDURANCE, and that the beacon did not interfere with the sensitive electronics on board.
I also built 3 receivers and loop antennas specifically for this project. I built the receivers in rugged cast aluminum cases. The knobs were made "stiff" with o-rings under the knobs to prevent accidental turning. I used five CR-123A lithium cells for power to provide long duration at low temperature. I also altered the receiver to operate on 10V (linear regulated) instead of 12V to make full use of the battery pack.
The receive loops used aluminum bicycle rims as frames, with a gap to prevent a shorted turn. The rims are rugged, provide an electrostatic shield, and most importantly present a very small crossectional area to the wind. The last feature is very important when attempting real-time tracking on a lake in Antarctica!

Warmer weather made tracking more difficult (and sometimes wet!)
Plastic underwater beacon housing (Bill Stone drawing)
The ferrite rod antenna is located in the small upper portion of the housing, with the battery and electronics in the larger lower portion. In use, the beacon is simply turned upright to turn it on, then hung on Endurance by its eye bolt. Since it must be self-leveling, it is free to swing over a limited range. Tests were conducted to make sure that "ground zero" really was directly over ENDURANCE, and that the beacon did not interfere with the sensitive electronics on board.
I also built 3 receivers and loop antennas specifically for this project. I built the receivers in rugged cast aluminum cases. The knobs were made "stiff" with o-rings under the knobs to prevent accidental turning. I used five CR-123A lithium cells for power to provide long duration at low temperature. I also altered the receiver to operate on 10V (linear regulated) instead of 12V to make full use of the battery pack.
The receive loops used aluminum bicycle rims as frames, with a gap to prevent a shorted turn. The rims are rugged, provide an electrostatic shield, and most importantly present a very small crossectional area to the wind. The last feature is very important when attempting real-time tracking on a lake in Antarctica!
Warmer weather made tracking more difficult (and sometimes wet!)
Radiolocation is being used to
continuously track ENDURANCE during each mission, except close to the
glacier face where it is too dangereous. It was determined early
on that the beacon could not be located at long ranges, likely due to
the presence of highly conducting water starting just below the depth
ENDURANCE operates at. Each time the robot stops to gather data
by lowering a science package, a precise location is done and a marker
flag set in the ice for later use by a survey team.